
??? 摘 要: 著重研究用于汽車天窗馬達(dá)" title="天窗馬達(dá)">天窗馬達(dá)裝配和檢測的集成系統(tǒng),從系統(tǒng)需要實現(xiàn)的功能著手,根據(jù)功能分析了系統(tǒng)的整體結(jié)構(gòu)和硬件的選取。重點介紹了核心部分模擬負(fù)載部分的實現(xiàn)原理,簡要介紹了系統(tǒng)軟件的構(gòu)成,數(shù)據(jù)的分析處理。
??? 關(guān)鍵詞: LabVIEW;? 數(shù)據(jù)采集" title="數(shù)據(jù)采集">數(shù)據(jù)采集;? PID控制;? 拉壓力傳感器
?
??? 汽車天窗馬達(dá)作為車頂天窗的運動控制的核心部件,其生產(chǎn)和質(zhì)量的檢測是保證天窗是否完好的最重要步驟。目前,國內(nèi)使用的設(shè)備絕大部分都是國外進(jìn)口的,不僅價格非常昂貴,而且不能擁有自主知識產(chǎn)權(quán)。因此,自主開發(fā)將具有深遠(yuǎn)的意義。Webasto車頂供暖系統(tǒng)有限公司是全球著名的專業(yè)車頂供暖系統(tǒng)設(shè)備商之一,本系統(tǒng)設(shè)備是為Webasto上海有限公司設(shè)計開發(fā)的。與常用的檢測扭矩的設(shè)備裝置不同,該系統(tǒng)采用拉壓力傳感器" title="拉壓力傳感器">拉壓力傳感器來檢測控制扭矩的大小,使得系統(tǒng)結(jié)構(gòu)緊湊精巧。同時操作簡單,測試過程自動完成。
1 系統(tǒng)簡介
本系統(tǒng)集裝配、通信、模擬和檢測于一體。系統(tǒng)主要由運動控制、負(fù)載模擬和數(shù)據(jù)采集三部分組成。其中負(fù)載模擬是為了模擬天窗馬達(dá)的實際工作情況:當(dāng)馬達(dá)帶動軸運轉(zhuǎn)時,磁粉制動器產(chǎn)生一定的扭矩(通過拉壓力傳感器的反饋而得到扭矩)來模擬馬達(dá)負(fù)載,并實時監(jiān)測速度、轉(zhuǎn)距、扭矩、電流等各項指標(biāo)參數(shù)。這需要實現(xiàn)多輸入輸出信號的集成控制和采集,涉及到多功能數(shù)據(jù)采集卡、信號調(diào)理卡、磁粉制動器、拉壓力傳感器、轉(zhuǎn)速/轉(zhuǎn)距傳感器以及電流電壓傳感器等硬件。鑒于虛擬儀器技術(shù)在數(shù)據(jù)處理和信號操作中的優(yōu)勢以及直觀仿真的用戶界面的特點,以LabVIEW作為開發(fā)工具,設(shè)計的測試控制系統(tǒng)高度集成,穩(wěn)定可靠,具有友好、直觀的用戶界面。測試時操作簡單,自動化程度高,并且對馬達(dá)的質(zhì)量判定指標(biāo)能同步生成數(shù)據(jù)庫記錄和實時圖形顯示,便于隨時查詢采集結(jié)果。
2 系統(tǒng)功能
待測天窗馬達(dá)放到支撐夾具上,夾具上有三個圓柱定位銷,與馬達(dá)三個定位孔一致,馬達(dá)旋轉(zhuǎn)齒輪與支撐夾具齒輪座相吻合,確保馬達(dá)在支撐夾具上放置平穩(wěn);ECU(電子控制單元)放到裝配馬達(dá)上面,手按自動測試開始按鈕,放置馬達(dá)與ECU的夾具進(jìn)入測試裝置內(nèi),到達(dá)正確位置后,三個下壓氣缸自動下壓,使ECU夾緊卡片進(jìn)入馬達(dá)鎖緊卡扣內(nèi),通過傳感器檢測三個卡片到位,并且能檢測是否斷裂、損壞;對馬達(dá)進(jìn)行自動檢測,完成自動檢測后,支撐夾具退出回到原位。
所有測試動作都可以進(jìn)行分步、單獨操作,通過選擇手動/自動切換按鈕完成。自動檢測步驟如下:
①進(jìn)行短路檢測(檢查馬達(dá)與ECU內(nèi)部金屬連接處是否有短路);
②讀取ID數(shù)據(jù)并判斷所檢測ECU軟件、硬件版本是否與所用參數(shù)文件一致;
③測試馬達(dá)接地是否完好;
④從參數(shù)文件中自動讀取參數(shù)并寫入ECU;
⑤測試所寫參數(shù)是否與參數(shù)文件中參數(shù)一致;
⑥帶動馬達(dá)向前后各旋轉(zhuǎn)4圈(在旋轉(zhuǎn)過程中測試平均運行電流、齒輪圓周位移、齒輪轉(zhuǎn)速是否在規(guī)定公差范圍內(nèi)),判斷檢測是否合格。
在自動測試過程中發(fā)生以下現(xiàn)象為檢測不合格:
①短路檢測不合格;
②ECU硬件或軟件版本與參數(shù)文件不一致;
③測試馬達(dá)接地不合格;
④所寫入?yún)?shù)文件與提供參數(shù)文件不一致;
⑤旋轉(zhuǎn)測試中馬達(dá)旋轉(zhuǎn)運行平均電流(去除開啟瞬間電流)、平均轉(zhuǎn)速或齒輪位移超過設(shè)定標(biāo)準(zhǔn)。
產(chǎn)品檢測合格,在顯示屏上自動顯示綠色合格圖標(biāo),并自動打印合格標(biāo)簽,標(biāo)簽上包括所裝配ECU信息(軟件版本、硬件版本、ID數(shù)據(jù)、產(chǎn)品名稱、生產(chǎn)日期、產(chǎn)品序列號等)。產(chǎn)品檢測不合格,在顯示屏上自動顯示紅色不合格圖標(biāo),并有不合格原因描述,自動打印不合格標(biāo)簽,標(biāo)簽上有不合格原因描述。
3 系統(tǒng)設(shè)計
3.1 硬件選擇
此測試系統(tǒng)用于檢測天窗馬達(dá)生產(chǎn)線的設(shè)計,待測馬達(dá)為直流電源供電,測試要求輸出電壓" title="輸出電壓">輸出電壓-16V~+16V(精度±0.1V),輸出電流0~30A(精度±0.01A),扭矩在0~10Nm(精度±0.1Nm),轉(zhuǎn)動位移為4轉(zhuǎn)(精度±0.1mm),轉(zhuǎn)速在300r/min以內(nèi)。根據(jù)上述測試要求,選用了SM1540可編程電源作為馬達(dá)供電電源,ZX-1.2YN-24#磁粉制動器作為模擬負(fù)載,PCI-9112采集卡、H58編碼器、XFTC-101-M5M等傳感器以及信號調(diào)理模塊構(gòu)成數(shù)據(jù)采集模塊。系統(tǒng)硬件原理結(jié)構(gòu)如圖1所示。
?

PCI-1762工業(yè)數(shù)字I/O板卡模擬0/12V 開關(guān)信號,有8路輸出。馬達(dá)接口共有10針腳,2個用于電源供電,1個是Webasto通信專用接口,1個授權(quán)接口,其余各針腳雖然不同型號的電機馬達(dá)定義各不相同,但是都是開關(guān)量信號,用于控制馬達(dá)的轉(zhuǎn)動角度。故馬達(dá)轉(zhuǎn)過的距離由驅(qū)動電源和PCI-1762共同來控制。磁粉制動器的輸出扭矩在本系統(tǒng)中與激勵電流有很好的線性關(guān)系,通過數(shù)據(jù)采集卡的模擬輸出通道傳遞電壓給驅(qū)動電路,驅(qū)動電路把電壓控制轉(zhuǎn)化并且放大為電流,用來控制磁粉制動器的輸出。檢測系統(tǒng)信號如轉(zhuǎn)速、轉(zhuǎn)距、電流等由相應(yīng)的傳感器經(jīng)過隔離變送后輸入到A/D。
3.2 負(fù)載模擬
負(fù)載模擬部分是測試系統(tǒng)的核心部分。圖2所示是負(fù)載模擬機構(gòu)圖。
?

該系統(tǒng)通過磁粉制動器模擬天窗負(fù)載,磁粉制動器的控制實現(xiàn)如下。
從相關(guān)文獻(xiàn)中,可以得到磁粉制動器的典型的傳遞函數(shù)為[1]:

式中:KM為扭矩與電流的增益;TN為扭矩過渡時間常數(shù);τ為磁粉制動器滯后時間。
連續(xù)函數(shù)信號經(jīng)過采樣開關(guān)后,其斷續(xù)信號頻譜中除了主頻譜分量外,會有附加頻譜分量,它們在系統(tǒng)中將起相當(dāng)于高頻干擾信號的作用。為了去除這些高頻分量對系統(tǒng)輸出的影響,需要應(yīng)用低通濾波器。通常應(yīng)用中起低通濾波作用的是各階保持電路或保持器" title="保持器">保持器。零階保持器是最常用的一種保持器,它把采樣時刻的采樣值恒定不變地保持(或外推)到下一采樣時刻。也就是說,在t∈[nT,(n+1)T]區(qū)間內(nèi),零階保持器的輸出值一直保持為X(nT)。如圖3所示,零階保持器的輸出Xh(t)為階梯信號。
?
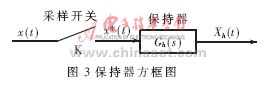
根據(jù)Xh(kT)=x(kT),(k=0,1,2,…),Xh(t)與連續(xù)輸入信號x(t)之間的關(guān)系式

?? Xh(t)的拉式變換為:

比較式(3)與式(2),可得零階保持器的傳遞函數(shù)為:

信號通過零階保持器有滯后相移,而且頻率成正比提高。所以保持器的引入,不利于閉環(huán)采樣系統(tǒng)的穩(wěn)定性。負(fù)載模擬控制系統(tǒng)的整個系統(tǒng)模型如圖4所示。
?
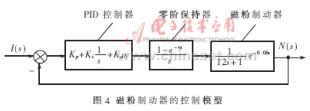
對整個系統(tǒng)而言,輸入量為電流I(s),輸出量為力矩N(s)。假設(shè)I(s)為幅值是30的階躍函數(shù),在Matlab中可用命令ones等效任意寬度的單位階躍激勵。靜態(tài)誤差e(s)=I(s)-N(s),作為PID控制器的輸入。
在Kp=1,Ki=Kd=0,無PID控制的情況下,取采樣周期T=0.1s,系統(tǒng)的階躍響應(yīng)如圖5所示。引入PID控制后,系統(tǒng)的階躍響應(yīng)如圖6。
?

由以上的仿真可見,引入PID控制,可以很好地改善制動器的曲線特性。
力傳感器兩端分別用螺紋與工作臺和連接件固定。傳感器兩端只受到水平力的作用。根據(jù)靜力平衡條件求出力的大小,選擇力傳感器的型號。
傳感器的信號實現(xiàn)原理如圖7所示。
?
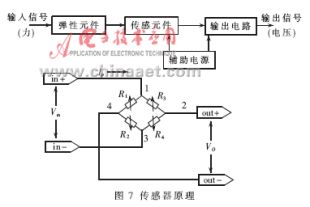
傳感元件由貼在圓筒內(nèi)壁上的電橋電路構(gòu)成。彈性體受力變形,導(dǎo)致電橋電路的半導(dǎo)體壓敏電阻R1、R2、R3、R4發(fā)生變化。
? 在圖7中,電橋電阻R1、R3 具有正增量,電阻R2、R4 具有負(fù)增量,當(dāng)各個橋臂電阻相同且值為R時,公式簡化為:
??? 
??? 從上式得知,電橋輸出電壓VO與輸入電壓Vin成正比關(guān)系,Vin是恒定電壓。當(dāng)電橋受壓力時,電橋電阻發(fā)生變化電橋失去平衡,即輸出電壓分別與電流和壓敏電阻相關(guān);當(dāng)給定恒定電流Ip時,輸出電壓VO僅僅隨壓敏電阻變化而改變。得到線性化的輸入輸出關(guān)系。
??? 由于傳感器輸出的電壓信號較低,其輸出阻抗很高,所以需要放大電路。
3.3 數(shù)據(jù)采集[2]和處理
軟件系統(tǒng)啟動時首先需要連接ACCESS數(shù)據(jù)庫[3],進(jìn)行初始化操作,數(shù)據(jù)庫操作成功后,會顯示如圖8的操作界面。操作者只要選擇所需測試的型號就可以進(jìn)入數(shù)據(jù)采集處理軟件主界面。
?

??? 對ECU通信進(jìn)行軟硬件版本驗證、讀取序列號、參數(shù)寫入與讀出等實現(xiàn)過程,詳見參考文獻(xiàn)[4]。圖9為進(jìn)行數(shù)據(jù)采集處理的VI子框圖程序的部分截圖。
?

3.4 實驗結(jié)果
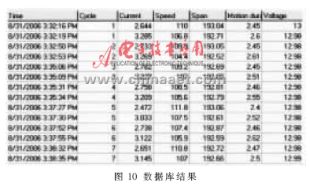
??? 測試結(jié)果保存在ACCESS結(jié)果表中,其中包括測試日期、時間、馬達(dá)序列號、馬達(dá)型號、所有測試參數(shù)或測試不合格描述。對所有異常測試情況進(jìn)行統(tǒng)計并以ACCESS方式保存在指定路徑下,其中包括測試日期、時間、馬達(dá)序列號、馬達(dá)型號、測試不合格描述、異常情況記錄。圖10為保存在數(shù)據(jù)庫中的文本數(shù)據(jù),圖11為圖形化實時生成數(shù)據(jù)圖[5]。
?
?

整個檢測系統(tǒng)開發(fā)涉及到多個物理量的控制和數(shù)據(jù)記錄、處理及存儲,結(jié)合虛擬儀器技術(shù),采用圖形化的編程開發(fā)平臺構(gòu)建出了本測試系統(tǒng)。由于舍棄了傳統(tǒng)的控制扭矩的方法,采用了力傳感器來反饋模擬負(fù)載,使得本設(shè)備的體積小,重量輕。
系統(tǒng)的開發(fā)不僅可以加快汽車天窗馬達(dá)檢測系統(tǒng)國產(chǎn)化的速度,自主掌握核心技術(shù),降低了成本,而且對于國內(nèi)汽車電子行業(yè)的發(fā)展具有深遠(yuǎn)的意義。
參考文獻(xiàn)
[1] ?ANG K H, CHONG G, LI Y. PID?Control System Analysis, Design, and??Technoloy[J]. IEEE Trans-actions On?Control Systems Technology. 2005,13(4):559-576.
[2] ?雷振山. LabVIEW 7 Express實用技術(shù)教程. 北京:中國鐵道出版社,2004.
[3] ?求是科技.Access 2002 數(shù)據(jù)庫開發(fā)技術(shù)與工程實踐.北京:人民郵電出版社, 2004.
[4] ?李華剛, 殷躍紅, 徐文超,等.基于K線的汽車天窗馬達(dá)ECU通訊系統(tǒng)的設(shè)計.電子技術(shù)應(yīng)用, 2007,33(1):77-80.
[5] ?BISHOP R H. LabVIEW 7實用教程. 喬瑞萍, 林欣譯.北京:電子工業(yè)出版社, 2006.