
1 引言
處在溫差條件下的礦物,對外表現(xiàn)為溫差熱電勢E,溫差一定時,E達到一平衡值。E除以溫差得到的就是礦物的熱電系數(shù),它能夠靈敏的反映礦物成分和晶體結構的某些細微差異,在金礦找礦和礦床評價方面具有極高的應用價值。用來測量礦物熱電性的熱電系數(shù)測量儀(熱電儀),在市場上并沒有現(xiàn)成的產(chǎn)品,需要根據(jù)需求自行開發(fā)。其中一項關鍵技術就是將溫度精確控制在設定值,為半導體礦物創(chuàng)造恒定的溫差條件。本文所設計的溫度控制系統(tǒng)就是來解決這一問題。
溫度控制系統(tǒng)是一種典型的過程控制,與其它控制系統(tǒng)相比,溫度控制系統(tǒng)有其特殊性[1]。例如,對機械系統(tǒng)或機電系統(tǒng),用線性定常集中參數(shù)的動力學微分方程來描述,通常不會帶來過大的誤差。然而用同樣的方法來處理溫度過程顯然不能令人滿意,因為熱能的傳遞是以場的方式進行的,所以它具有明顯的非線性、時變性、分布性以及時間滯后。若用解析的方法為它建模,其結果不是過于復雜,就是在模型簡化過程中,失去某些最本質的因素,使模型和對象間產(chǎn)生過大的偏差。因此,對溫度系統(tǒng)的建模,通常用經(jīng)驗建模,或經(jīng)驗與理論分析相結合的建模。
本文介紹的溫度控制系統(tǒng),通過改進的PID控制算法,結合硬件ARM7內核的S3C44B0微處理器,由傳感器PT100獲取溫度信號,通過自整定獲取最適合系統(tǒng)的實時控制參數(shù),實現(xiàn)對所需溫度的精確控制。系統(tǒng)包括電加熱器、控制器和溫度傳感器及變換器三部分,構成閉環(huán)控制回路。這種主動熱控制的特點在于可適時調節(jié)被控對象的熱傳遞效率,對外部變化反應靈敏,溫度調節(jié)精度高。
2 系統(tǒng)設計
2.1 總體設計
該溫度控制系統(tǒng)要求實現(xiàn)對設定溫度的實時控制,操作人員可以通過鍵盤設定目標控制溫度,通過單片機的邏輯程序控制,實現(xiàn)溫度的高精度控制。整個控制系統(tǒng)的組成主要分為三部分,即三星公司生產(chǎn)的S3C44B0X單片機所構成的單片機控制系統(tǒng);由Pt100熱電阻、溫度補償,運算放大電路構成的溫度檢測通道;由三極管運放電路、固態(tài)繼電器和外部加熱器構成的輸出控制通道。其中,單片機控制系統(tǒng)是整個系統(tǒng)的控制中心,所有的數(shù)據(jù)運算、處理和交換功能都是利用單片機的軟件來實現(xiàn)。
工作時,設定溫度由操作人員通過鍵盤完成,并通過LCD顯示設定溫度值;由Pt100熱電阻檢測控制對象實際溫度值,經(jīng)過RWB溫度變送器和放大電路,將溫度信號送入S3C44B0的A/D端口,經(jīng)過固定公式換算得出實際溫度并實時顯示。程序控制系統(tǒng)將實際溫度值與系統(tǒng)設定溫度值進行比較,按照自整定PID控制算法進行運算,確定下一時間單元輸出PWM信號占空比,以控制固態(tài)繼電器的導通時間,從而控制外部加熱器的平均輸出功率,實現(xiàn)溫度控制。圖1是系統(tǒng)的整體設計方案。
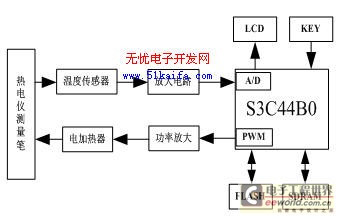
圖1 溫控系統(tǒng)原理圖
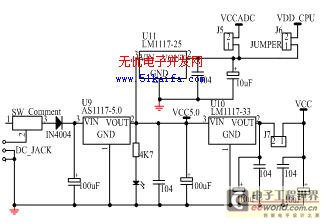
圖2 控制系統(tǒng)電源電路
2.2 S3C44B0X片上資源 [2]
S3C44B0X是SAMSUNG公司出品的一款基于ARM7TDMI內核的32位RISC結構的CPU,是一款高性價比微處理器。其豐富的片上資源充分保證了本系統(tǒng)的實現(xiàn):2.5V供電的ARM7TDMI內核上增加8kB的Cache;外部擴充存儲器控制器(FP/EDO/SDRAM控制,片選邏輯);LCD控制器(最大支持256色的DSTN)并帶有一個LCD專用DMA通道; 2個帶有握手協(xié)議的UART,1個SIO; 5個PWM定時器及1個內部定時器;看門狗定時器;71個通用可編程I/O口,8個外部中斷源;多種功耗控制模式;8路10 位ADC; PLL時鐘發(fā)生器等。
2.3 系統(tǒng)的實現(xiàn)
整個系統(tǒng)的硬件設計主要分為五部分,即電源電路部分、鍵盤電路部分、檢測電路部分、控制及顯示電路部分以及輸出控制。系統(tǒng)需要三種不同電壓,分別是外圍的5.0V、ARM內核2.5V以及I/O3.3V[3],由交流220V轉直流7.5V變壓器供電,設計電源電路如圖2所示。
鍵盤電路完成系統(tǒng)的各項功能參數(shù)的設置,包括設定溫度值、儀器的工作模式、儀表基本參數(shù)如初始PID參數(shù)等。鍵盤響應電路只有當檢測到管腳電平到達或者低于一個電平數(shù)值的時候才認同是有鍵被按下,并通過延時處理程序,即當程序通過施密特觸發(fā)檢測到有按鍵落下后仍要經(jīng)過一個延時再進行判斷,只有確定仍然處于按下狀態(tài)時才認定按鍵落下,進而跳轉至相應的按鍵處理程序,并在處理程序中判斷按鍵是否彈起,保證了每一次按鍵的有效性和準確性。S3C44B0自帶8路10位A/D,所以省去了A/D轉化電路,可以直接讀取放大后的信號并通過固定公式計算出實際溫度值,將此溫度值與設定值進行比較,經(jīng)過PID運算,調整CPU通過I/O口PE5(PE3~PE7可任選其一)所輸出PWM脈沖信號的占空比,從而改變固態(tài)繼電器的通斷時間,由此控制電熱絲的導通比率,從而控制加熱器的輸出功率,實現(xiàn)溫度調節(jié)、控制。
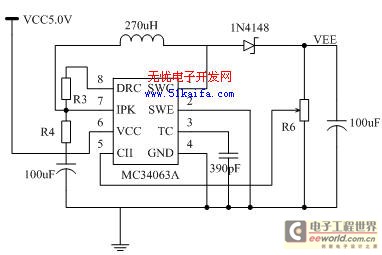
系統(tǒng)的顯示采用LCD,用來顯示溫度值、工作模式、及礦物熱電系數(shù)讀數(shù)等。設計液晶顯示器和控制電路時,必須提供電源驅動、偏壓驅動以及LCD顯示控制器。由于S3C44B0X本身自帶LCD控制器,所以控制電路的設計可以省去顯示控制電路,只需進行電源驅動和偏壓驅動的電路設計。本系統(tǒng)選用的液晶屏為GPG1624UWE1單色16級灰度的2.7寸液晶屏,與S3C44B0X采用4位單掃描方式連接。此液晶屏的驅動電源是22.6V,這里采用MC34063A電源管理模塊,通過R8調節(jié)將5V的電壓升至22.6V以提供液晶顯示屏的驅動電源,如圖3所示;偏壓電源由系統(tǒng)升壓后的電源分壓得到,LM324用來穩(wěn)定電壓、增強帶載能力,如圖4所示。
關鍵字:ARM;溫度控制;PID;自整定" title="ARM;溫度控制;PID;自整定">ARM;溫度控制;PID;自整定
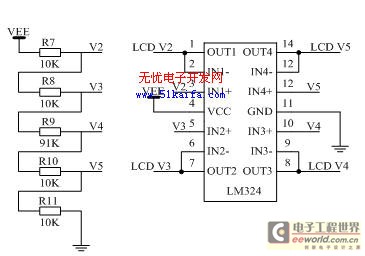
圖4 LCD偏壓電源電路
3 PID自整定算法原理和實現(xiàn)
3.1 PID控制器
PID 控制器是一種比例、積分、微分并聯(lián)負反饋控制器,是一種線性控制器,它根據(jù)給定值r(t)與實際輸出值 y(t) 的差值構成控制偏差 e(t)。
PID 的控制規(guī)律為: (1)
(1)
式中:  —比例系數(shù);TI —積分時間常數(shù);TD —微分時間常數(shù)。
—比例系數(shù);TI —積分時間常數(shù);TD —微分時間常數(shù)。
3.2 歸一參數(shù)整定法
在微處理器S3C44B0為硬件核心的控制系統(tǒng)中,選擇合適的采樣周期,對輸入輸出采樣,得到離散時間控制系統(tǒng)。在離散時間控制系統(tǒng)中,PID 控制器用差分方程表示為:
 (2)
(2)
式中:T 為采樣周期, ,
, 。u(k)與u(k-1)相減得增量式 PID 控制算法的輸出增量為:
。u(k)與u(k-1)相減得增量式 PID 控制算法的輸出增量為:
 (3)
(3)
(3) 式又可寫為:  (4)
(4)
根據(jù) Ziegler-Nichle 條件[3],令 。
式中: Tk 為臨界振蕩周期。代入(4)可得:  (5)
(5)
這就是擴充臨界比例整定法(歸一參數(shù)整定法)只需整定一個參數(shù),適合于計算機自整定。
3.3 整定準則和方法
該方法采用時間乘絕對誤差積分準則(ITAE 準則):ITAE =  (6)
(6)
當ITAE取最小值時,控制系統(tǒng)為最佳狀態(tài)。它具有對單位階躍響應的初始誤差考慮少,著重權衡瞬態(tài)響應后期出現(xiàn)的誤差,因此要尋求其最小值。計算ITAE最小值可等效于求ITAE*最小值: ITAE* =  (7)
(7)
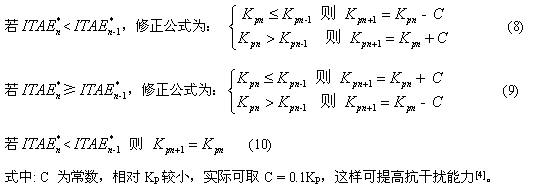
每次計算 的值,與上次得到的 比較,根據(jù) 的變化趨勢對 PID 算式中的參數(shù)KP進行修正,N可取5~10,每隔N個采樣周期按修正公式對KP進行一次修正。
4結論
實驗發(fā)現(xiàn):此溫度控制系統(tǒng)達到穩(wěn)定需要一定的時間;環(huán)境溫度對穩(wěn)定過程有輕微的影響,但對精度幾乎沒有影響;而參數(shù)N(每N個周期修正一次KP)的選取,對精度具有決定性的作用。熱電儀的使用特性決定了最常用的溫度是50℃左右,實驗中當選擇控制溫度為45℃時,經(jīng)過約12min系統(tǒng)趨于穩(wěn)定,其中當N取12時,穩(wěn)定后溫度偏差達到±2℃,當N取5時,溫度偏差為±0.3℃,相對誤差0.7%達到了較高的控制精度,完全符合熱電儀溫度控制系統(tǒng)的要求。在一定范圍內,隨著N取值的減小,控制精度在提高。經(jīng)過調試,在熱電儀的實際應用中N取5。
本文所設計的溫度控制系統(tǒng)通過合理地搭建于ARM嵌入式平臺,采用PID自整定算法,與常規(guī)PID控制算法比較,使被控對象的溫度波動大幅度減小,具有響應時間短、超調量小、控制精度高、穩(wěn)定性好、智能化等優(yōu)點。在進行軟硬件調試的基礎上,應用于熱電系數(shù)測量儀中,經(jīng)測試,此控制系統(tǒng)工作穩(wěn)定可靠,滿足了系統(tǒng)溫度控制精度要求,具有較高的實用價值。本文作者創(chuàng)新點:在軟硬件實現(xiàn)并滿足需求的基礎上給出了詳細的理論依據(jù),理論和實際應用達到了很好的結合,為同類系統(tǒng)的升級、改進打下了良好的基礎。
參考文獻:
[1] 盧靈,高巖. 基于S3C44B0的溫度控制系統(tǒng)[J] . 微計算機信息,2006,5-2:113-115
[2]SamsungElectronics.S3C44B0XUserManual.[EB/OL].http://www.samsung.com,2000.4.13/2005.10.20
[3] 謝新民,丁鋒. 自適應控制系統(tǒng)[M].北京:清華大學出版社,2002年7月
[4] 李小帆,姚根和. 高精度溫度控制技術[J].無線電技術,2005年,第00期