
1 引言
層析成像CT(Computed Tomography)是指通過物體外部檢測到的數(shù)據(jù)來重建物體內(nèi)部(橫截面)信息的技術(shù),又稱為計算機(jī)輔助斷層成像技術(shù)。它是把不可分割的對象假想切成一系列薄片,分別給出每一薄片上的物體圖像,然后再把該系列圖像疊加起來,從而得到物體內(nèi)部圖像。它是一種由數(shù)據(jù)到圖像的重建技術(shù),通過偽彩色圖像反映被測材料或制件內(nèi)部質(zhì)量,定性、定量分析其缺陷,從而提高檢測的可靠性。層析成像技術(shù)創(chuàng)新了探測物質(zhì)內(nèi)部結(jié)構(gòu)。該技術(shù)可應(yīng)用于多種能量波和粒子束,如X射線、電子質(zhì)子、超聲波等。
CT應(yīng)用超聲波能量稱為超聲層析成像U-CT(Ultrasonic-Computed Tomography)。早期研究假設(shè)超聲波在物體內(nèi)部以直線傳播,利用發(fā)射器到接收器之間的時間延遲或振幅衰減,重建物體內(nèi)部的聲速、吸收特性等參數(shù)。但實際超聲波具有明顯的衍射特征,在界面上具有顯著的折射、衍射,因而傳播路徑復(fù)雜,這使得U-CT的理論研究和X射線層析成像(X-CT)有所不同。獲得更清晰的圖像檢測效果則成為首要問題,因此,這里提出一種超聲層析成像檢測系統(tǒng)的設(shè)計。
2 超聲CT陣列檢測方法
針對超聲層析成像檢測中數(shù)據(jù)提取較困難的特點,為提高精度,在深入研究超聲場的特點,結(jié)合數(shù)字化技術(shù),這里并未采用目前主流的依次排列的一線式布置方法,而是采用環(huán)繞式陣列檢測方法,如圖1所示。

根據(jù)試件形狀,將探頭陣列按照一定次序捆綁在試件周圍,其原則是應(yīng)均勻布置,這樣有利于數(shù)據(jù)處理過程中網(wǎng)格的劃分和射線追蹤。在脈沖信號的控制下,當(dāng)其中一個作為發(fā)射探頭時,其余探頭作為接收探頭,各個探頭依次發(fā)射超聲波信號。探頭的個數(shù)由所測試件的大小、測量精度、網(wǎng)格劃分情況等因素決定。采取該布置方法的優(yōu)點:可實現(xiàn)任意形狀試件的檢測,具有良好的通用性;獲得較精確的檢測信息。
3 基于DSP的超聲CT成像系統(tǒng)的總體設(shè)計
該系統(tǒng)由超聲發(fā)射接收電路、信號采集、控制電路、信號處理與顯示部分組成,如圖2所示。整個超聲CT成像檢測系統(tǒng)由數(shù)據(jù)(聲時)采集、數(shù)據(jù)處理,以及圖像處理顯示3部分構(gòu)成。所需設(shè)備和元件包括:若干超聲發(fā)射探頭和接收探頭;由單片機(jī)組成的脈沖控制電路;2個讀寫存儲器RAM;2個由DSP組成的數(shù)字信號處理電路(分別內(nèi)置射線追蹤程序和反演迭代程序),及DSP驅(qū)動的顯示陣列LCD。
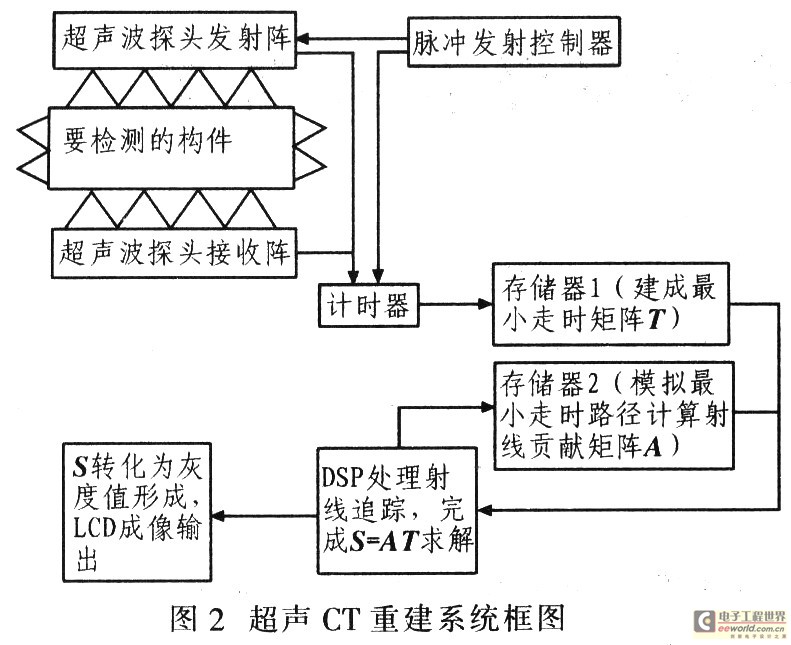
超聲發(fā)射裝置是由脈沖控制電路以一定周期發(fā)射超聲波,接收探頭接收信號后,通過高精度計時器得到最小走時矩陣,并存儲于存儲器1,從而完成數(shù)據(jù)采集;由存儲器1中的最小走時矩陣初步建立(假定超聲直線傳播)介質(zhì)內(nèi)部的慢度矩陣,南慢度矩陣按照射線追蹤得到走時路徑,存儲于存儲器2,按照存儲器1,2中的信息,經(jīng)DSP處理,完成方程求解,得到最終精確的慢度矩陣,完成該系統(tǒng)的核心功能一數(shù)據(jù)處理;重建的慢度矩陣轉(zhuǎn)化為灰度值,由DSP控制LCD顯示陣列。最后由工程技術(shù)人員對照標(biāo)準(zhǔn)的無缺陷的介質(zhì),分析試件,確定有無缺陷,缺陷的位置,大小以及嚴(yán)重情況。
4 圖像重建算法
實現(xiàn)超聲層析成像有正演和反演兩個基本過程。正演是反演的基礎(chǔ),其模型選取與求解精度直接影響反演變精度;而反演過程實際是對問題的最優(yōu)化過程。反演方法一般分為變換重建法和級數(shù)展開法兩大類。由于級數(shù)展開法通過離散重建區(qū)域,降低原有問題的非線性,適合投影數(shù)據(jù)不夠精確、不能完全且以射線為曲線的層析成像。根據(jù)反演的理論基礎(chǔ),層析成像分為以射線理論為基礎(chǔ)的射線層析和以波動理論為基礎(chǔ)的波動層析。目前CT技術(shù)從直射層析成像向彎曲射線層析成像發(fā)展。反演方法由最小二乘法發(fā)展到各種約束條件下的加權(quán)阻尼最小二乘法以及統(tǒng)計法,如最大熵法。觀測參數(shù)由單一走時數(shù)據(jù)向多參數(shù)數(shù)據(jù)發(fā)展。反演方法則從線性(代數(shù)重建法、聯(lián)合跌代重建法等方法)向非線性(梯隊法、模糊神經(jīng)網(wǎng)絡(luò)算法和遺傳算法等方法)方向發(fā)展。射線追蹤是確定波從激發(fā)點傳至接收點的射線路徑及其走時的主要技術(shù)。因為層析面上各點的波速不相等,波傳播的路徑是一個與材料不均勻性相關(guān)的曲線,其真實路徑未知,所以可采用射線追蹤理論求取其真實路徑。而射線追蹤算法分為向前處理與向后處理兩部分。
(1)向前處理先計算離散網(wǎng)格模型上所有邊界點的最小走時,然后計算發(fā)射點單元所在列各單元邊界上所有離散點的最小走時。并記錄對應(yīng)的次級源,接著對發(fā)射點單元所在行各單元邊界上所有點的計算與第二步相同。在求出每網(wǎng)格內(nèi)局部走時的基礎(chǔ)上,對發(fā)射源發(fā)出的射線在整個模型上的走時相加便得到全局最小走時。
(2)向后處理根據(jù)向前處理中得到的各單元邊界上所有計算點的最小走時及相應(yīng)次級源,追蹤所有發(fā)射點到接收點間具有最小走時的射線路徑。首先求出接收點所在單元邊界上走時最小的離散點,以走時最小的離散點為新的接收點,重復(fù)上一步驟向前推,直到發(fā)射點所在單元為止。將發(fā)射點與最后的射線交點相連。即完成全部向后處理。

5 層析結(jié)果
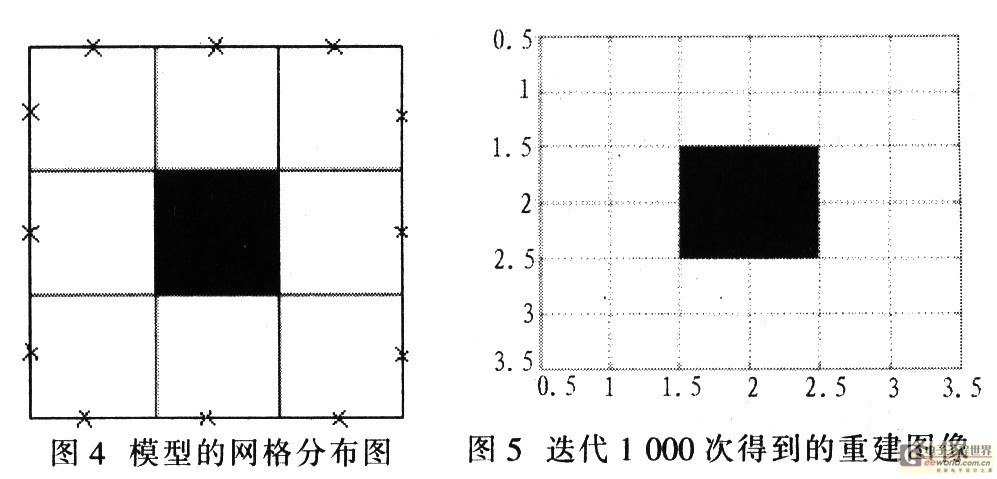
圖4為假設(shè)模型的網(wǎng)格分布圖,其背景區(qū)域的速度為v0=4.000 m/s,異常區(qū)(即黑色區(qū)域)速度為v1=3 000 m/s。探頭布置采用環(huán)繞方式,利用線性插值射線追蹤算法和聯(lián)合迭代重建算法得到速度層析圖像,結(jié)果如圖5所示,從圖5中可清晰發(fā)現(xiàn)低速區(qū)。因此,解決了圖像檢測中圖像清晰度不高的困擾。此設(shè)計方案可運(yùn)用到各種需要利用超聲波圖像檢測的領(lǐng)域。
6 結(jié)論
本文所采用的陣列檢測方法,在射線追蹤算法和SIRT重建方法的基礎(chǔ)上,所提取的走時數(shù)和超聲波數(shù)目大大增加,這樣在相同的迭代次數(shù)條件下,得到結(jié)果更精確,重建圖像結(jié)果更清晰準(zhǔn)確。