
引 言
光電軸角編碼器,又稱光電角位置傳感器,是一種集光、機、電為一體的精密數字測角裝置,它把軸角信息轉換成數字代碼,與計算機和顯示裝置連接后可實現動態測量和實時控制。隨著編碼器在工業、國防、航天等部門的廣泛應用,對編碼器的技術指標提出了越來越高的要求。測角誤差是編碼器的重要技術指標, 細分誤差是測角誤差的主要分量,細分誤差的檢定要求用精密的小角度測量儀器|儀表在嚴格的實驗室條件下進行,且檢測過程復雜、時間長。為了存編碼器使用現場快速及時地檢測出編碼器的細分誤差,研制了一種編碼器的細分誤差快速測量系統,將編碼器精碼的光電信號采集到計算機,進行諧波分析,計算出編碼器的細分誤差。
1數據采集系統
1.1 系統硬件
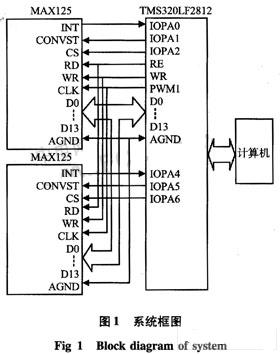
該系統的核心器件是TMS320F2812和MAX125。TMS320F2812是TI公司的一款高速DSP處理芯片。本系統采用1片DSP芯片控制2片A/D轉換芯片。圖1所示為DSP控制2片轉換芯片的系統框圖。
1.2 TMS320F2812
C281x系列DSP是TI公司最新推出的32位定點數字信號處理器,是基于TMS320C2000數字信號處理器平臺開發的,其代碼與24x/240x數字信號處理器完全兼容。
C281x處理器采用C/C++編寫軟件,其效率高,用戶不僅可以應用高級語言編寫系統程序,也可采用C/C++高效率的數學算法。C281x 系列數字信號處理器在完成數學算法和系統控制等任務時都具有較高的性能,這樣,就避免了用戶在1個系統中需要多只處理器的麻煩。C281x處理器內核包含了1個32位×32位的乘法累計單元,能夠完成64位的數據處理能力。從而使該處理器能夠完成更高精度的處理任務。
1.3 MAX125
MAX125是一款帶多路采樣保持器的高速14位A/D轉換芯片。該芯片包含1只14位,轉換時間為3μs的逐次逼近式A/D轉換器,1 個+2.5 V的內部電壓基準。每一個采樣保持器都對應2路輸入信號,一共可以接收8路信號輸入。輸入電壓為±5 V。芯片具有±17 V輸入電壓保護。
MAX125采用的是并行數據接口,和DSP的數據存取時序相同,與DSP通信時不需要等待周期,可以達到很高的通信速率。單路轉換的最高速率為250 ksps,4路最高速率為76 ksps。
1.4 軟件控制流程
要分析編碼器在工作時的細分誤差,數據采集速率要在100 ksps以上。本系統采用2片A/D轉換芯片,分時采集編碼器的4路信號,當讀其中一片芯片的數據時,啟動另一芯片開始轉換。采用本方法4通道的最高采樣速率可達120 ksps以上,2通道的最高采樣速率可達240 ksps以上。
采集到的數據需要經過傅立葉變換,計算出編碼器的細分誤差。當數據量太大時,會給后續的數據處理帶來很多麻煩;數據量太少時,又不能反映信號的真實情況。實驗證明:編碼器每個精碼周期的最佳采樣點數應在60~100點之間。在本系統中采樣點設定為85點,根據編碼器加速度的變化,采樣點會在附近波動。DSP在接收到采樣命令后,對編碼器信號進行采樣,首先,判斷編碼器的轉速,設定采樣頻率,保證一個周期的采樣點數在85點左右,連續采樣3個以上完整的周期,采樣完成后將數據一并傳給計算機處理。
2數據處理
編碼器輸出的是角度信息,其輸出信號是以角度為自變量的空間函數。如果數據采集卡的采樣頻率是固定的,并且,編碼器是勻速轉動,理論上可以得到等轉角的角度信息。在編碼器實驗或工作時,數據采集卡的采樣頻率可以控制成固定采樣頻率,但編碼器不可能是嚴格意義上的勻速運動,可以認為是加速度很小的等加速運動,所以,采集到的精碼光電信號是非等轉角的。在編碼器工作時,采集2路相位差為π/2的正弦精碼光電信號usin和ucos,首先,計算編碼器的加速度,再利用線性插值法進行等轉角處理,得到一組新的數據u′sin和u′cos,由u′sin和u′cos組成的精碼光電信號就是一組等轉角的光電信號。
編碼器2路相位差為π/2的正弦精碼光電信號ua和ub,精碼光電信號通常含有直流電平、基波及高次諧波。高次諧波以二次和三次諧波為主要分量,故可其波形方程為

編碼器精碼光電信號具有周期函數的性質,任何一個周期函數,都可以展開為如下的傅立葉級數
式(4)表明:一個周期函數可以由常數項a0與各次諧波之和組成。其中,An為f(x)的各次諧波的振幅;φn為相應的各次諧波的初相角。這樣,對實測數據信號進行諧波分析,可以求出a0,An和φn。
由于信號u′sin和u′cos是編碼器的等轉角信號,可以對其進行諧波分析。利用軟件VC++編寫計算程序計算出式(1)和式(2)的波形參數,即求出精碼光電信號的波形方程。編碼器光電信號的細分技術是建立在一定信號波形(通常為正弦波)的基礎上。當波形參數偏離預定參數時,就會產

3實驗測量
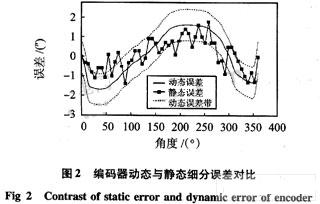
某21位增量式編碼器為8192對線/周光柵盤,經電子學256細分后,分辨力為0.6"。利用數據采集卡將差分放大后的2路精碼光電信號與數據采集裝置的2路輸入端相連,通過人機操作界面運行數據采集程序。采集編碼器精碼光電信號放大后的電壓值,接人計算機得到動態數據,并計算動態細分誤差。利用二十一面體和自準直儀,任意選擇一個細分周期,測量靜態細分誤差,動態與靜態細分誤差曲線如圖2所示。
4結論
本文提出了一種高精度編碼器動態細分誤差的快速測量系統,與傳統的靜態檢測編碼器細分誤差方法相比,該方法檢測編碼器動態細分誤差的實驗過程簡便、檢測速度快。不僅可用于實驗室檢測,也可以用于編碼器工作現場對編碼器動態細分誤差進行*估。實驗證明:該方法是可行的。